TCC1224
Toy car engine controller

The needs
Electric toy cars are powered by DC motors usually controlled by simple electromechanical switching of the power supply battery connections. This kind of solution has various critical elements that negatively affect both children playing experience and toy longevity.
The simple electromechanical switching of motor power supply generates sudden starts, stops and changes of direction/speed with consequent strong stress on its mechanical parts (wheels, gears, fixings), in addition to the possible discomfort of children driving. On models with more powerful motors, in some cases the toy car may also wheelie temporarily.
The management of a secondary drive speed, when available, is typically obtained by electromechanical switching of the connection between the motors and the power supply battery, changing from the series connection (1st speed) to the parallel one (2nd speed).
In case of a different grip between the two wheels, the series connection of motors (1st speed) leads to a ‘differential’ effect which cause the maximum rotation speed of the wheel with less grip, while the other remains stationary. This behaviour makes the playing experience unpleasant and is sometimes perceived as a malfunction of the toy.
The electromechanical switching parts must also be sized to support high current values both in the supply and switching phases, with consequent possible usury and reliability problems.
Aware of all the problems described above, a large international company leader in the sector of product for children asked us to design an alternative solution for the traction and braking control of their electric toy cars product line.
The challenges
- Progressive control of the power delivered to engines during power up and speed change phases
- Progressive deceleration during stop or speed reduction phases
- Controlled management of reversal during motion
- Self-restoring protections from over current, over energy (I2T) and over temperature
- Support of 12V and 24V battery power supply
- High current deliverable to motors continuously (30A) and peak (80A)
- Usage without the need for thermal dissipation
- Management of accessory functions (lights, radio, dashboard)
- Auto shutdown due to inactivity or low battery
- Configurable drive speed
- Possibility of wireless remote control
- Compliance with toy safety regulations
The realization
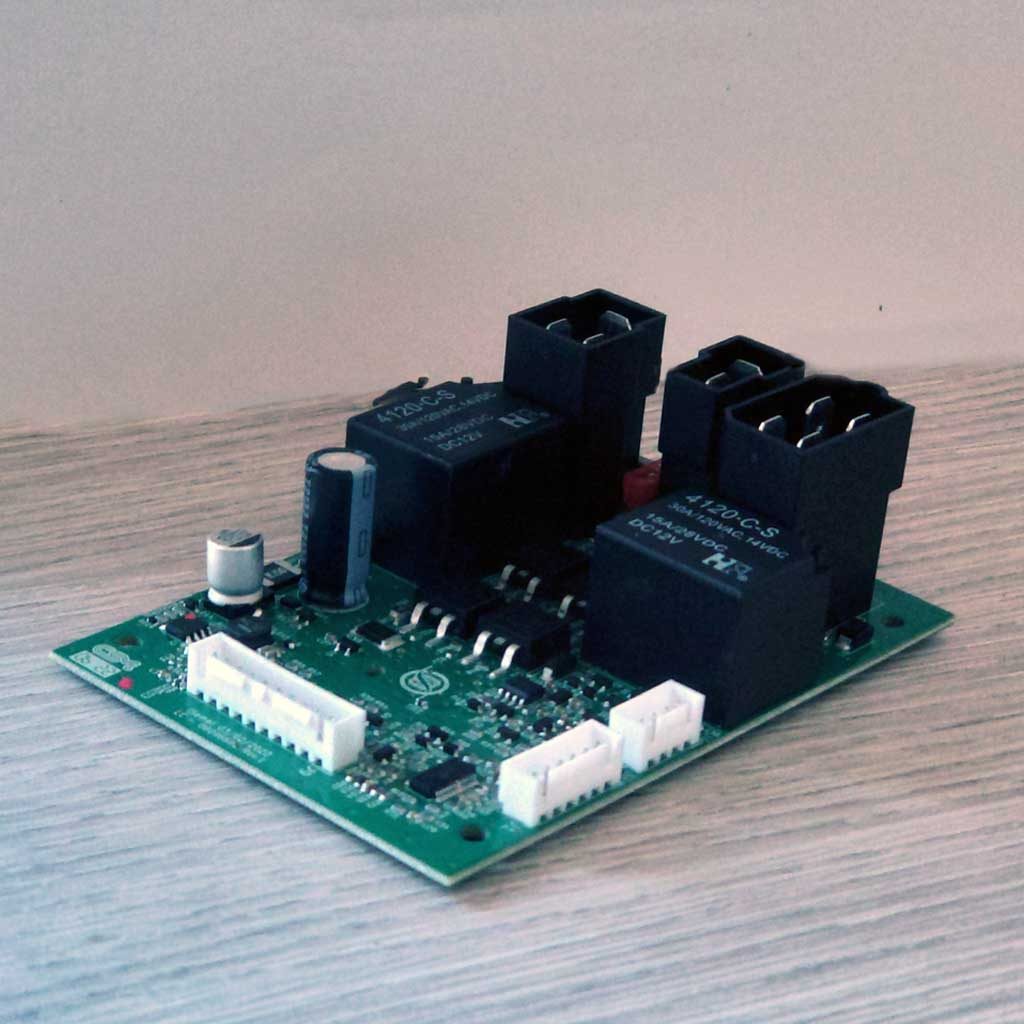
The TCC1224 device designed by iSEMAR is an electronic board that uses a PWM motor driver to manage the progressive power delivery during start up and acceleration phases, and the progressive deceleration during stop and speed reduction phases. The TCC1224 device is controlled by low voltage and low power electrical signals, so it does not require high current/power switching components.
The hardware and firmware of the TCC1224 include functions for detection and protection against over-current, over-temperature and over-energy conditions (according to I2T calculation) that could occur in cases of abnormal use of the toy. There are also auto shut-off functions in case of inactivity or low battery.
The board also integrates all the required accessory functions (lights, sounds, dashboard...), simplifying the wiring and assembly of the toy.
The TCC1224 device has compact dimensions compatible with a wide range of electric toy models and, thanks to the high energy transfer efficiency, does not require heat dissipation elements.
The safety of the board, and of the toy that mounts it, is achieved by a set of electrical solutions, hardware and firmware, that ensure full compliance with the required regulations and never expose the toy in dangerous conditions even in presence of possible failures.
The TCC1224 device also allows the complete remote control by connecting it to a dedicated external wireless module, while maintaining the local management of all safety features.